在過程控制的反饋系統(tǒng)中,如果純滯后時(shí)間或增益發(fā)生較大隨機(jī)變化,那么在試圖減少偏差時(shí),反饋?zhàn)饔脤⑹А4藭r(shí)過程變量遠(yuǎn)離其操作范圍反饋控制器幾乎不可能對(duì)設(shè)定值進(jìn)行準(zhǔn)確快速的跟蹤。其結(jié)果是,該過程的波動(dòng)變得不可接受。
前饋控制用于在這些干擾有機(jī)會(huì)進(jìn)入系統(tǒng)并擾亂過程變量之前檢測(cè)并糾正這些干擾。必須記住,前饋控制不考慮過程變量。它對(duì)已知過程干擾的感知或測(cè)量做出反應(yīng),使其成為補(bǔ)償和協(xié)調(diào)控制,以使干擾和控制的影響互相抵消。基于圖1所示不變性原理的前饋控制的理想控制器形式會(huì)非常復(fù)雜,往往和干擾通道和控制通道的動(dòng)態(tài)特性相關(guān)。在實(shí)際使用中,為了簡(jiǎn)化和增強(qiáng)魯棒性,常采用最簡(jiǎn)單的靜態(tài)前饋形式。
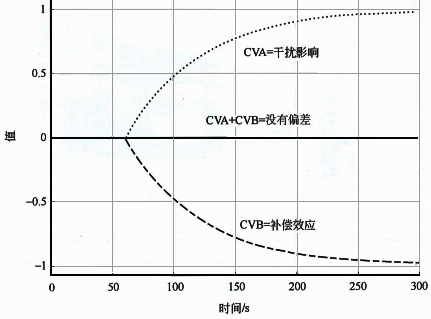
圖1 前饋的不變性原理
前饋主要用于防止偏差(過程干擾)進(jìn)入或干擾過程系統(tǒng)內(nèi)的控制回路。反饋用于糾正閉環(huán)控制系統(tǒng)中檢測(cè)到的由各種過程干擾引起的所有偏差。
手動(dòng)前饋控制與串級(jí)控制一樣,前饋控制在項(xiàng)目管理或者社會(huì)管理工作中也有類比。如果主管是部門的負(fù)責(zé)人,向下屬發(fā)出指令以完成重要任務(wù),那么前饋系統(tǒng)就是當(dāng)有人通知主管即將影響部門的重要變化時(shí),主管可以采取先發(fā)制人的措施,在完全感受到其影響之前更好地管理這種變化。如果這些預(yù)測(cè)信息是準(zhǔn)確的,并且主管的響應(yīng)是適當(dāng)?shù)模敲醋兓娜魏呜?fù)面影響將被最小化到不需要被動(dòng)調(diào)整的程度。換句話說,前饋控制行動(dòng)將可能發(fā)生的危機(jī)轉(zhuǎn)化為微不足道的小事件。
1、手動(dòng)前饋控制
前饋控制與反饋控制是完全不同的概念。前饋控制屬于開環(huán)控制,而反饋控制屬于閉環(huán)控制。手動(dòng)前饋控制如圖2所示。干擾進(jìn)入過程后,操作員會(huì)對(duì)其進(jìn)行檢測(cè)和測(cè)量。然后,操作員根據(jù)對(duì)過程的了解,改變操縱變量,使干擾對(duì)系統(tǒng)的影響降至最低。前饋控制和反饋控制是人員干預(yù)系統(tǒng)的兩個(gè)主要控制模式,如果決策是基于干擾做出的屬于前饋控制,如果決策是基于過程變量或偏差做出的則屬于反饋控制。
前饋控制")
圖2 手動(dòng)前饋控制
這種形式的前饋控制在很大程度上依賴于操作員對(duì)過程動(dòng)態(tài)的了解。如果操作員出錯(cuò)或無法預(yù)測(cè)干擾,則過程變量將偏離其設(shè)定值。如果前饋控制是唯一的控制,則將存在未修正的偏差,所以在實(shí)際情況中大多都是基于偏差的反饋控制和基于干擾補(bǔ)償?shù)那梆伩刂坡?lián)合使用。
2、自動(dòng)前饋控制
自動(dòng)前饋控制檢測(cè)并測(cè)量即將進(jìn)入過程的干擾,然后前饋控制器根據(jù)這些干擾對(duì)過程變量的影響,改變PID控制器輸出。
前饋控制雖然是一個(gè)非常吸引人的概念,但是前饋控制必須考慮干擾對(duì)過程變量的所有確切影響。前饋控制對(duì)系統(tǒng)設(shè)計(jì)者和操作員都提出了很高的要求,要從數(shù)學(xué)上分析和理解擾動(dòng)對(duì)相關(guān)過程的影響。因此,前饋控制通常只適用于更重要、更關(guān)鍵的控制回路。
單獨(dú)的前饋控制很少使用。更常見的是,前饋控制嵌入反饋控制回路中,通過最小化主要過程干擾的影響來顯著改進(jìn)控制性能,再通過反饋消除其他干擾造成的穩(wěn)態(tài)偏差。重要的是要記住,前饋控制主要是為了減少或消除過程反應(yīng)時(shí)間和任何可測(cè)過程變量變化的影響。
前饋控制器可能只需要執(zhí)行簡(jiǎn)單(開-關(guān))控制,也可能需要高階數(shù)學(xué)計(jì)算。由于前饋控制器的要求差異很大,因此可以將其視為功能控制塊。前饋控制的范圍從簡(jiǎn)單的開關(guān)控制到超前/滯后(微分和積分函數(shù))和計(jì)時(shí)塊。前饋的工作范圍幾乎是無限的,因?yàn)榇蠖鄶?shù)系統(tǒng)允許前饋控制作為基于軟件的數(shù)學(xué)函數(shù)進(jìn)行“編程”。前饋的成功則取決于對(duì)擾動(dòng)的性質(zhì)和幅度要有精確理解和測(cè)量,否則可能弄巧成拙。
動(dòng)態(tài)前饋需要根據(jù)過程干擾通道和控制通道的動(dòng)態(tài)特性加以確定,其結(jié)構(gòu)往往比較復(fù)雜,而且嚴(yán)重依賴于模型參數(shù)的準(zhǔn)確性。而靜態(tài)前饋是指前饋控制為靜態(tài)特性,是由干擾通道的增益和控制通道的增益的比值決定的。靜態(tài)前饋的作用是使前饋干擾對(duì)過程變量的穩(wěn)態(tài)影響被基本抵消,而不考慮其動(dòng)態(tài)特性,將擾動(dòng)的動(dòng)態(tài)特性交給PID反饋控制處理,這是因?yàn)殪o態(tài)前饋已經(jīng)把前饋的大部分效果都實(shí)現(xiàn)了。動(dòng)態(tài)前饋既復(fù)雜又不可靠,在實(shí)際應(yīng)用中較少使用。當(dāng)過程干擾通道和控制通道的動(dòng)態(tài)特性比較接近時(shí)可以直接使用靜態(tài)前饋,這也是實(shí)際過程中使用前饋控制的大部分場(chǎng)合。